

 08寸手持控制器
08寸手持控制器 10寸控制器
10寸控制器 12寸控制器
12寸控制器 15寸控制器
15寸控制器 17寸控制器
17寸控制器 19寸控制器
19寸控制器 BK1系列伺服驅(qū)動(dòng)器
BK1系列伺服驅(qū)動(dòng)器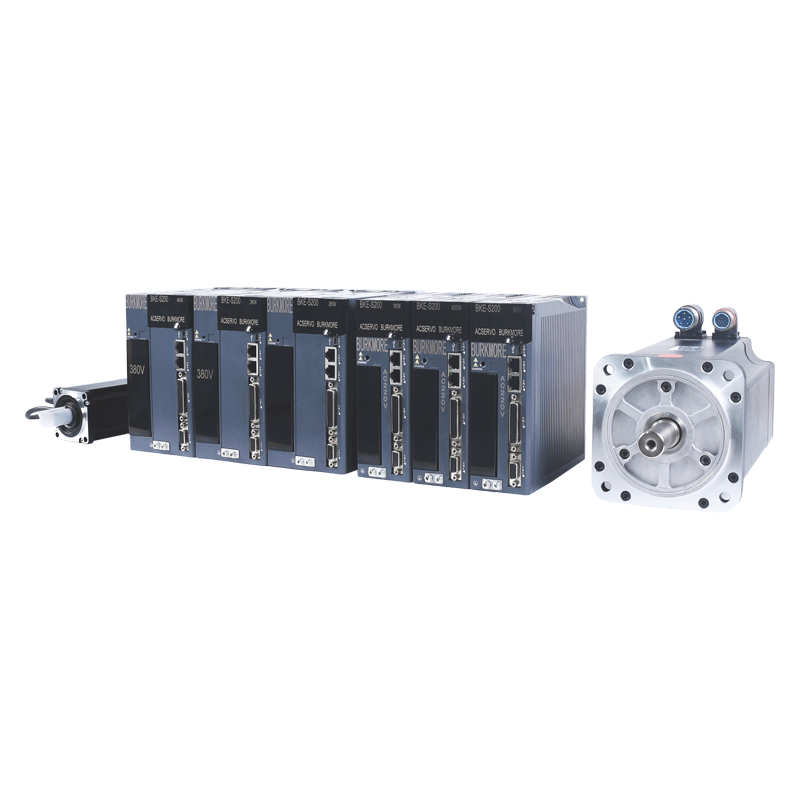 Bk2系列伺服驅(qū)動(dòng)器
Bk2系列伺服驅(qū)動(dòng)器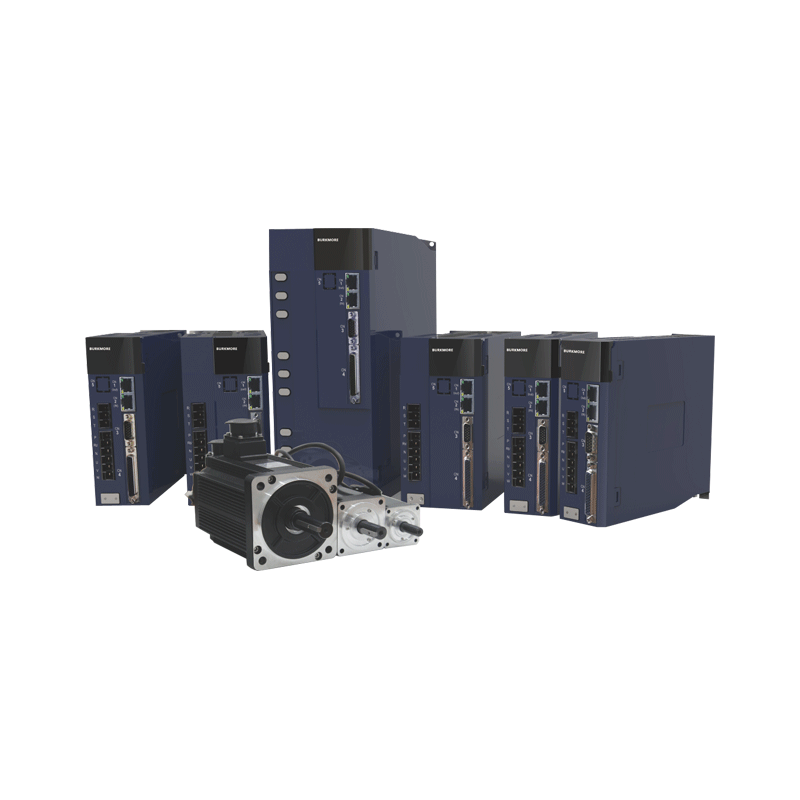 Bk3系統(tǒng)高性能伺服驅(qū)動(dòng)器
Bk3系統(tǒng)高性能伺服驅(qū)動(dòng)器 BKM多合一系列產(chǎn)品
BKM多合一系列產(chǎn)品 BKB低壓總線混合伺服驅(qū)動(dòng)器
BKB低壓總線混合伺服驅(qū)動(dòng)器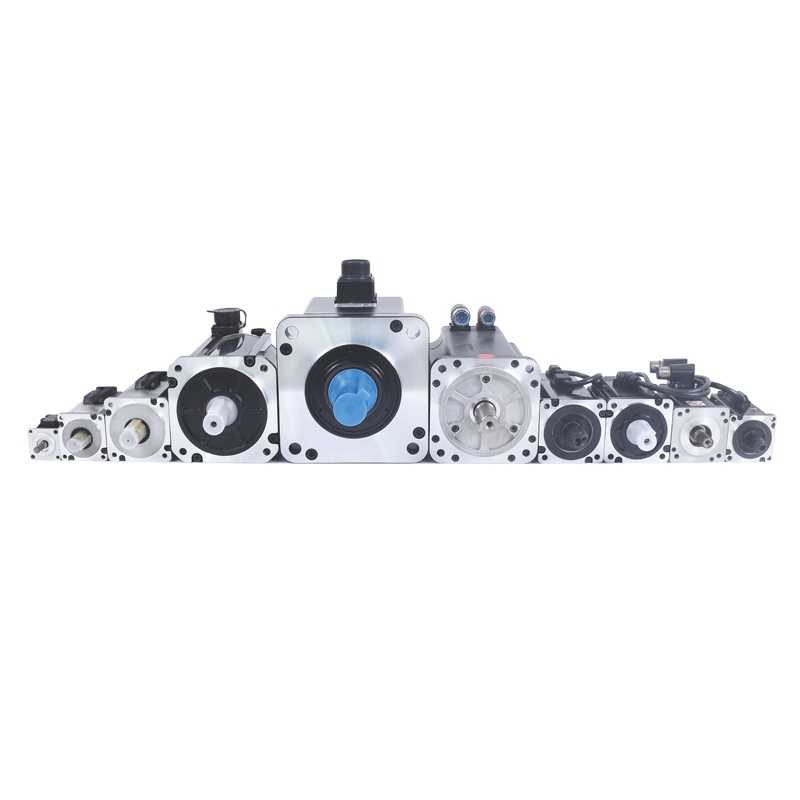 BKT系列電機(jī)
BKT系列電機(jī) 現(xiàn)場(chǎng)總線IO
現(xiàn)場(chǎng)總線IO 擴(kuò)展模塊
擴(kuò)展模塊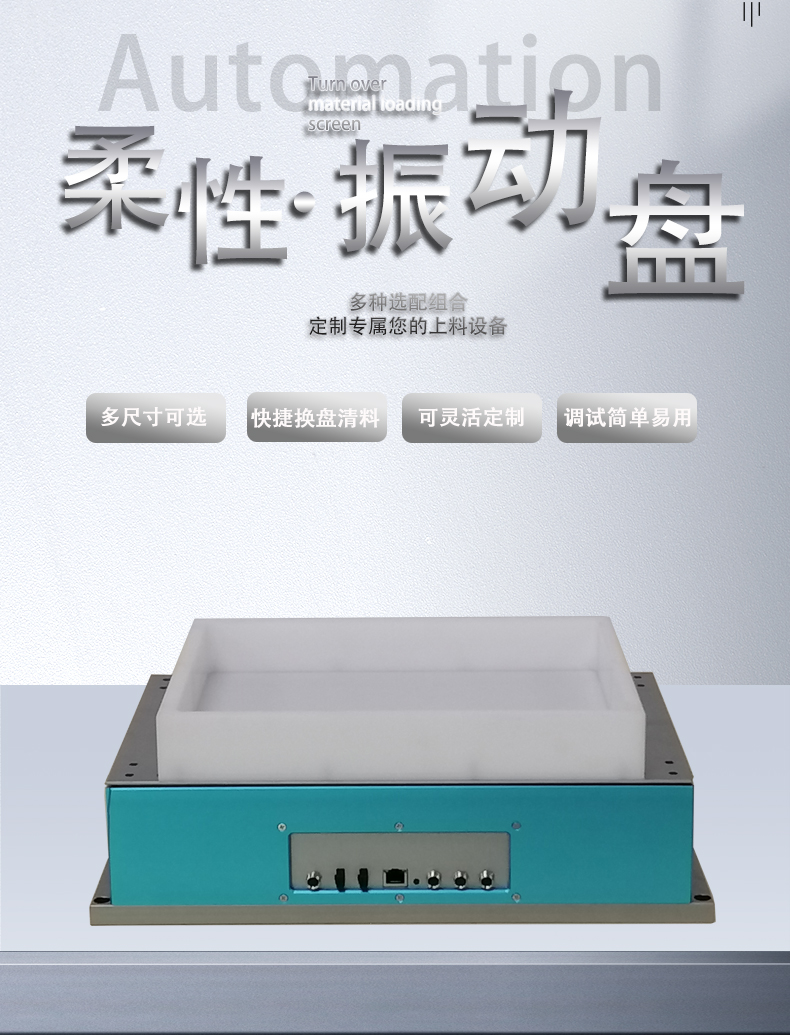 柔性振動(dòng)盤|視覺(jué)供料設(shè)備
柔性振動(dòng)盤|視覺(jué)供料設(shè)備 機(jī)器視覺(jué)
機(jī)器視覺(jué) Burkmore柔性振動(dòng)盤
Burkmore柔性振動(dòng)盤 CDD柔性上料擺盤方案
CDD柔性上料擺盤方案 車床上下料機(jī)械手控制器操作說(shuō)明
車床上下料機(jī)械手控制器操作說(shuō)明




一、車床上下料機(jī)械手控制系統(tǒng)的基本原理
車床上下料機(jī)械手控制系統(tǒng)是指通過(guò)電氣、電子和計(jì)算機(jī)技術(shù)來(lái)控制機(jī)械手的運(yùn)動(dòng)和操作?;驹戆ㄒ韵聨讉€(gè)方面:
1. 傳感器:用于感知工件的位置、尺寸和狀態(tài)等信息。
2. 控制器:負(fù)責(zé)接收和處理傳感器信號(hào),控制機(jī)械手的運(yùn)動(dòng)和操作。
3. 執(zhí)行器:根據(jù)控制器的指令,實(shí)現(xiàn)機(jī)械手的運(yùn)動(dòng),如伺服電機(jī)、氣缸等。
4. 編程:通過(guò)編寫程序,確定機(jī)械手的工作路徑和動(dòng)作序列。
二、車床上下料機(jī)械手控制系統(tǒng)的組成
車床上下料機(jī)械手控制系統(tǒng)一般由以下幾個(gè)組成部分構(gòu)成:
1. PLC(可編程邏輯控制器):作為核心控制單元,負(fù)責(zé)接收和處理傳感器信號(hào),并根據(jù)預(yù)設(shè)的邏輯控制程序,控制機(jī)械手的動(dòng)作。
2. 人機(jī)界面(HMI):提供操作界面,用于人機(jī)交互、參數(shù)設(shè)置和監(jiān)控機(jī)械手運(yùn)行狀態(tài)。
3. 傳感器:如光電傳感器、壓力傳感器等,用于感知工件位置、尺寸和狀態(tài)等信息。
4. 伺服電機(jī):驅(qū)動(dòng)機(jī)械手各關(guān)節(jié)的運(yùn)動(dòng),實(shí)現(xiàn)精準(zhǔn)定位和靈活操作。
5. 通信模塊:與其他設(shè)備進(jìn)行數(shù)據(jù)通信,如與車床、輸送帶等設(shè)備的協(xié)調(diào)工作。
三、車床上下料機(jī)械手控制系統(tǒng)的作用
車床上下料機(jī)械手控制系統(tǒng)具有以下重要作用:
1. 自動(dòng)化操作:通過(guò)控制系統(tǒng)的編程和邏輯控制,實(shí)現(xiàn)機(jī)械手的自動(dòng)化操作,替代人工操作,提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2. 精確定位:利用伺服電機(jī)等執(zhí)行器,實(shí)現(xiàn)機(jī)械手各關(guān)節(jié)的精準(zhǔn)控制和定位,確保工件的準(zhǔn)確上下料。
3. 靈活性和多功能:通過(guò)編程和邏輯控制,機(jī)械手可以實(shí)現(xiàn)不同工件的上下料操作,適應(yīng)不同生產(chǎn)需求。
4. 安全保障:控制系統(tǒng)可以監(jiān)測(cè)和控制機(jī)械手的運(yùn)動(dòng)范圍和速度,確保操作過(guò)程中的安全性,防止意外事故的發(fā)生。
5. 數(shù)據(jù)采集和分析:控制系統(tǒng)可以獲取機(jī)械手運(yùn)行過(guò)程中的數(shù)據(jù),并進(jìn)行分析和統(tǒng)計(jì),為生產(chǎn)管理和優(yōu)化提供參考依據(jù)。
結(jié)論:
車床上下料機(jī)械手控制系統(tǒng)是實(shí)現(xiàn)機(jī)械手自動(dòng)化操作和精確控制的關(guān)鍵技術(shù)。它由PLC、HMI、傳感器、伺服電機(jī)和通信模塊等組成,具有自動(dòng)化操作、精確定位、靈活性和多功能、安全保障以及數(shù)據(jù)采集和分析等重要作用。隨著工業(yè)自動(dòng)化的不斷發(fā)展,車床上下料機(jī)械手控制系統(tǒng)將在生產(chǎn)線中發(fā)揮越來(lái)越重要的作用,提高生產(chǎn)效率和產(chǎn)品質(zhì)量,推動(dòng)工業(yè)的進(jìn)步和發(fā)展。
