

 08寸手持控制器
08寸手持控制器 10寸控制器
10寸控制器 12寸控制器
12寸控制器 15寸控制器
15寸控制器 17寸控制器
17寸控制器 19寸控制器
19寸控制器 BK1系列伺服驅(qū)動(dòng)器
BK1系列伺服驅(qū)動(dòng)器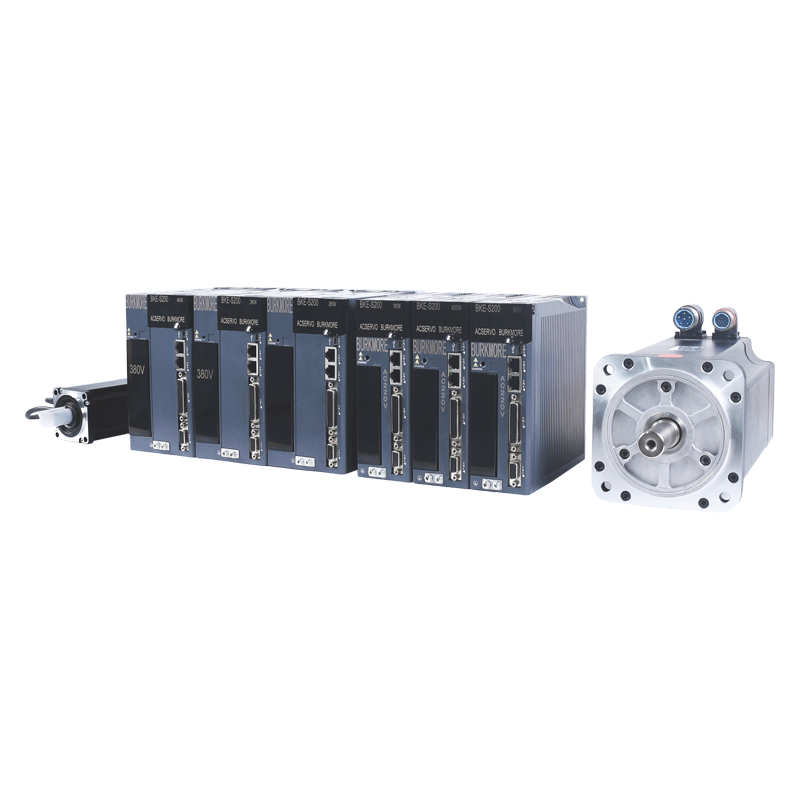 Bk2系列伺服驅(qū)動(dòng)器
Bk2系列伺服驅(qū)動(dòng)器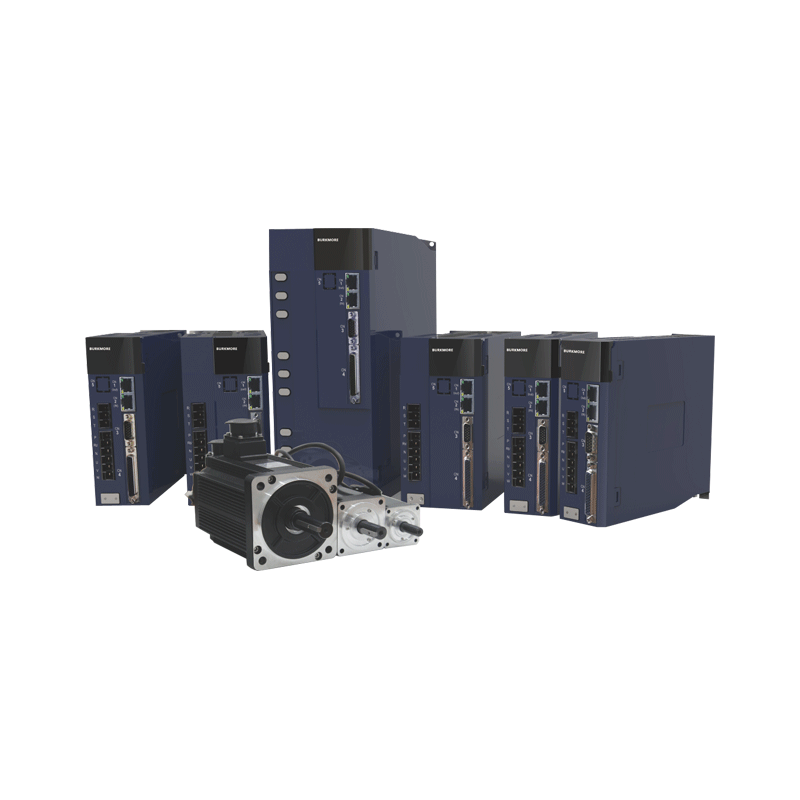 Bk3系統(tǒng)高性能伺服驅(qū)動(dòng)器
Bk3系統(tǒng)高性能伺服驅(qū)動(dòng)器 BKM多合一系列產(chǎn)品
BKM多合一系列產(chǎn)品 BKB低壓總線混合伺服驅(qū)動(dòng)器
BKB低壓總線混合伺服驅(qū)動(dòng)器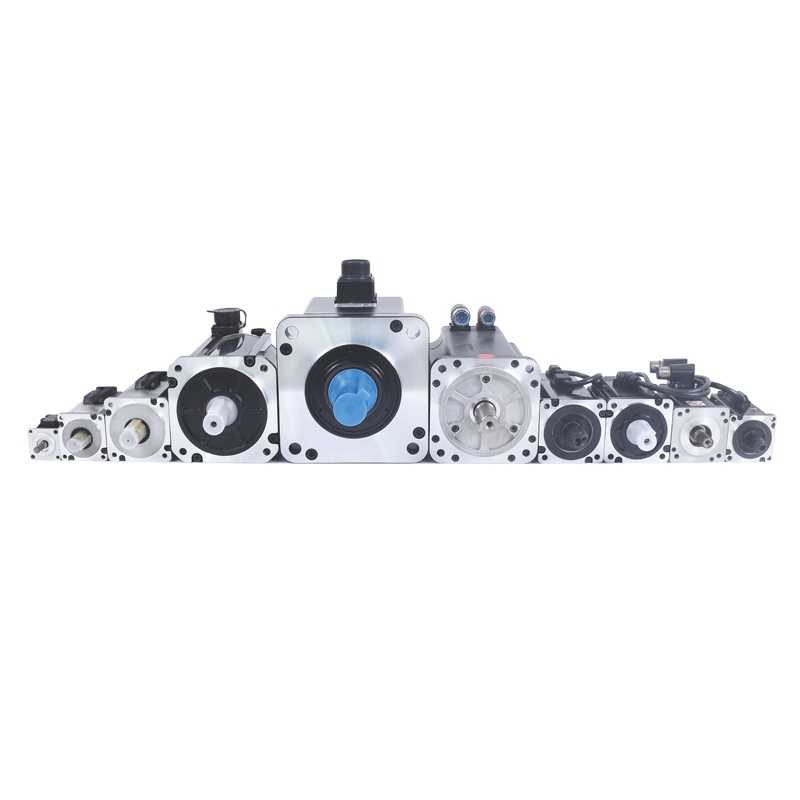 BKT系列電機(jī)
BKT系列電機(jī) 現(xiàn)場(chǎng)總線IO
現(xiàn)場(chǎng)總線IO 擴(kuò)展模塊
擴(kuò)展模塊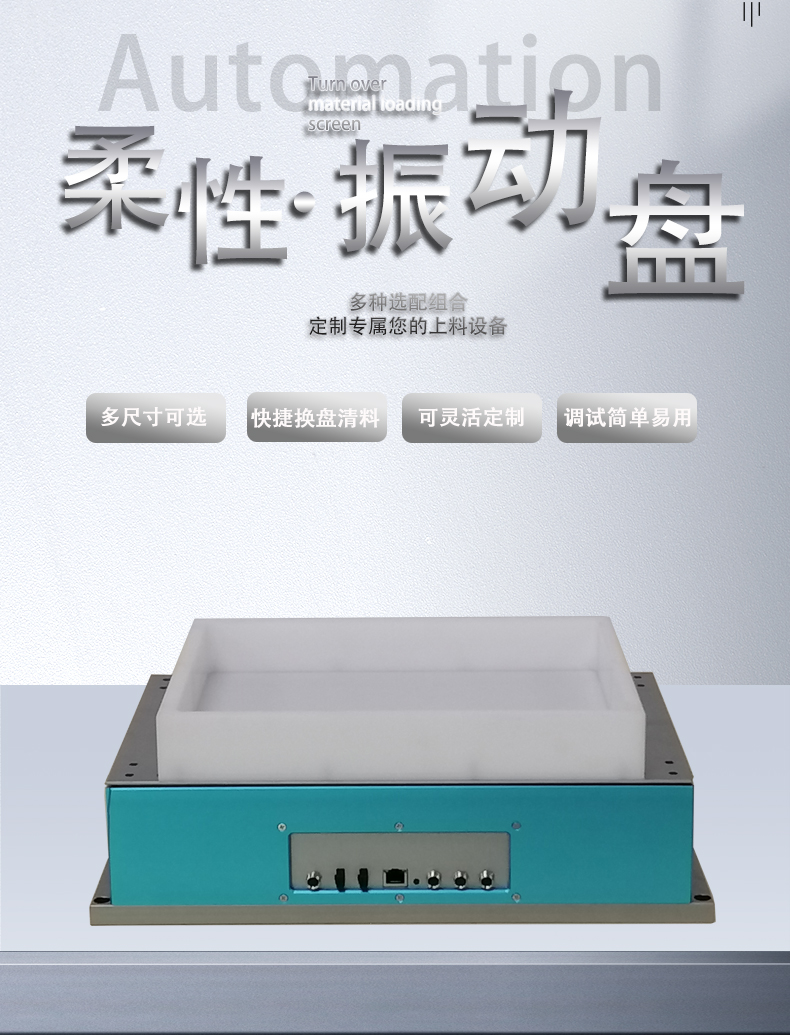 柔性振動(dòng)盤|視覺(jué)供料設(shè)備
柔性振動(dòng)盤|視覺(jué)供料設(shè)備 機(jī)器視覺(jué)
機(jī)器視覺(jué)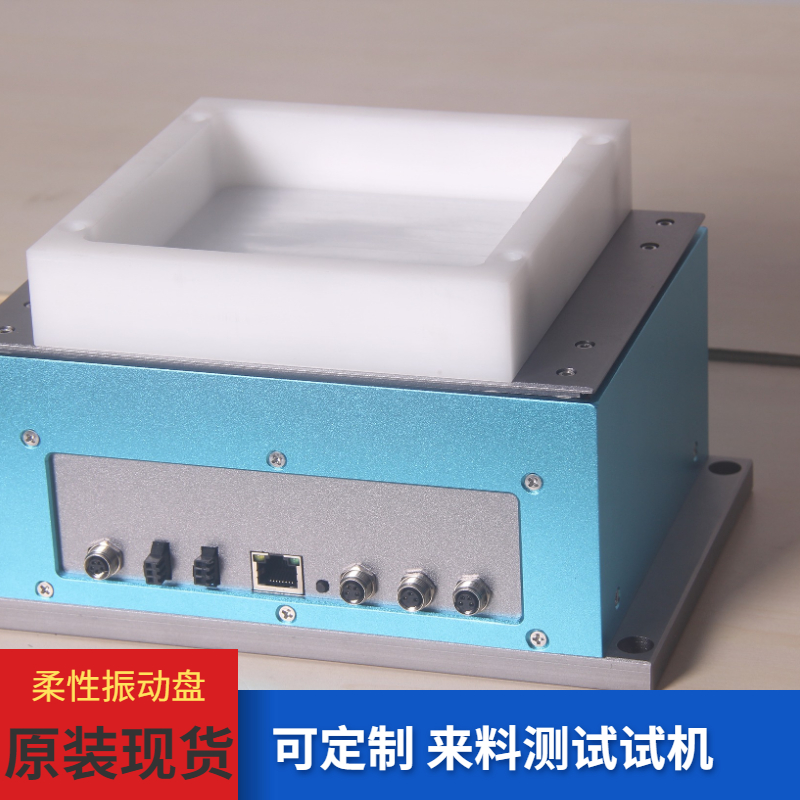 Burkmore柔性振動(dòng)盤
Burkmore柔性振動(dòng)盤 CDD柔性上料擺盤方案
CDD柔性上料擺盤方案 車床上下料機(jī)械手控制器操作說(shuō)明
車床上下料機(jī)械手控制器操作說(shuō)明




柔性上料工作站是一種采用柔性振動(dòng)盤、視覺(jué)系統(tǒng)和機(jī)械手(機(jī)器人)相結(jié)合的智能設(shè)備,用于實(shí)現(xiàn)對(duì)零件的柔性視覺(jué)供料。它能夠在工業(yè)生產(chǎn)環(huán)境中,高效地完成零件的自動(dòng)上料任務(wù),提高生產(chǎn)效率和精度。
首先,柔性振動(dòng)盤是柔性上料工作站的核心組成部分。振動(dòng)盤采用了先進(jìn)的振動(dòng)技術(shù),通過(guò)振動(dòng)將散亂的零件有效地排列和傳送到供料區(qū)域。柔性振動(dòng)盤能夠根據(jù)生產(chǎn)需求進(jìn)行調(diào)整和適配,以適應(yīng)不同類型、尺寸和形狀的零件。它能夠提供穩(wěn)定的供料效果,確保零件按需提供給后續(xù)工序。
其次,視覺(jué)系統(tǒng)是柔性上料工作站的關(guān)鍵部件之一。它通過(guò)攝像頭或其他感知設(shè)備對(duì)零件進(jìn)行檢測(cè)和識(shí)別。視覺(jué)系統(tǒng)能夠?qū)α慵M(jìn)行精確的定位和識(shí)別,判斷其形狀、位置和方向等特征?;谶@些信息,視覺(jué)系統(tǒng)能夠?qū)崟r(shí)調(diào)整機(jī)械手的動(dòng)作和路徑,以準(zhǔn)確地抓取和放置零件。視覺(jué)系統(tǒng)通過(guò)高精度的圖像處理算法和人工智能技術(shù),實(shí)現(xiàn)對(duì)復(fù)雜零件的準(zhǔn)確識(shí)別和定位。
機(jī)械手(機(jī)器人)作為柔性上料工作站的執(zhí)行部件,負(fù)責(zé)對(duì)零件進(jìn)行抓取和放置。機(jī)械手具備靈活、精準(zhǔn)的動(dòng)作能力,能夠根據(jù)視覺(jué)系統(tǒng)提供的信息,以及預(yù)先編寫的程序,精確地操作抓取和放置動(dòng)作。機(jī)械手采用了先進(jìn)的運(yùn)動(dòng)控制和感知技術(shù),保證零件的準(zhǔn)確抓取和放置。它能夠適應(yīng)不同尺寸和重量的零件,并具備高速和高精度的動(dòng)作能力,使供料過(guò)程更加高效和可靠。
柔性上料工作站的工作流程如下:首先,振動(dòng)盤將散亂的零件排列并送到供料區(qū)域;然后,視覺(jué)系統(tǒng)對(duì)零件進(jìn)行檢測(cè)、定位和識(shí)別;接著,機(jī)械手基于視覺(jué)系統(tǒng)的反饋信息進(jìn)行抓取和放置動(dòng)作。這種緊密配合的工作流程使得柔性上料工作站能夠高效地完成零件的柔性視覺(jué)供料任務(wù)。
總結(jié)起來(lái),柔性上料工作站通過(guò)柔性振動(dòng)盤、視覺(jué)系統(tǒng)和機(jī)械手的協(xié)同作業(yè),實(shí)現(xiàn)了對(duì)零件的柔性視覺(jué)供料。該工作站可以廣泛應(yīng)用于工業(yè)生產(chǎn)中,能夠提高生產(chǎn)效率、精度和自動(dòng)化水平。通過(guò)不斷地技術(shù)創(chuàng)新和優(yōu)化,相信柔性上料工作站將在工業(yè)自動(dòng)化領(lǐng)域發(fā)揮越來(lái)越重要的作用。
